 |
KerMor
0.9
Model order reduction for nonlinear dynamical systems and nonlinear approximation
|
|
KerMor
0.9
Model order reduction for nonlinear dynamical systems and nonlinear approximation
|
MotoModel: Motoneuron model. More...
MotoModel: Motoneuron model.
The global time unit for this model is milliseconds [ms].
Relevante Frequenzbereiche: 6-50Hz.
Public Member Functions | |
| Model (limit_meancurrent) | |
| function
varargout = | plot (varargin) |
| plots some interesting states of the model More... | |
 Public Member Functions inherited from models.BaseFullModel Public Member Functions inherited from models.BaseFullModel | |
| BaseFullModel (char name) | |
| Creates a new instance of a full model. More... | |
| function | delete () |
| function | off1_createParamSamples () |
| Offline phase 1: Sample generation. More... | |
| function | off2_genTrainingData () |
| Offline phase 2: Snapshot generation for subspace computation. More... | |
| function | off3_computeReducedSpace () |
| Offline phase 3: Generate state space reduction. More... | |
| function | off4_genApproximationTrainData () |
| Generates the training data \(x_i\) for the \(\hat{f}\)-approximation and precomputes \(f(x_i)\) values. More... | |
| function | off5_computeApproximation () |
| Offline phase 5: Core function approximation. More... | |
| function | off6_prepareErrorEstimator () |
| Prepares offline data for a possible error estimator. More... | |
| function | offlineGenerations () |
| Performs all large offline computations for model reduction. More... | |
| function [
models.ReducedModel reduced , double time ] = | buildReducedModel (varargin) |
| Builds a reduced model from a full model. More... | |
| function [
t , x , time , cache ] = | computeTrajectory (colvec< double > mu, inputidx) |
| Computes a solution/trajectory for the given mu and inputidx in the SCALED state space. More... | |
| function [
double t ,
matrix< double > y , colvec < double > mu , in , ct ] = | getSimCacheTrajectory (nr) |
| function | plotTrajectoryNr (nr) |
| function [
V , W ] = | assembleProjectionMatrices (target_dim) |
| function file = | save (char directory,char filename) |
| Saves this instance inside the data.ModelData.DataDirectory folder using the model's SaveTag if set or "model.mat". More... | |
| Public Member Functions inherited from models.BaseModel | |
| BaseModel () | |
| function | delete () |
| function | initDefaultParameter () |
| Reads the default values of the System's ModelParam list and initializes the BaseModel.DefaultMu with it. More... | |
| function [
rowvec< double > t , matrix < double > y , double sec , x ] = | simulate (colvec< double > mu,integer inputidx) |
| Simulates the system and produces the system's output. More... | |
| function [ handle f , handle ax ] = | plot (rowvec< double > t,matrix< double > y, varargin) |
| Plots the results of the simulation. Override in subclasses for a more specific plot if desired. More... | |
| function [ handle f , handle ax ] = | plotState (rowvec t,matrix< double > x, varargin) |
| Plots the results of the simulation. Override in subclasses for a more specific plot if desired. More... | |
| function [
f , ax ] = | plotSingle (double t,colvec< double > y, varargin) |
| Plots a single solution. Override in subclasses for specific plot behaviour. More... | |
| function | plotInputs (pm) |
| function [
double t ,
colvec< double > x , double ctime ] = | solveStatic (colvec< double > mu,integer inputidx) |
| Solves the linear system \(A(t,\mu)*x + f(t,\mu) + B(t,\mu)*u(t) = 0\). Spatial dependence of f is neglected in the current implementation (since this would require solving a nonlinear system). More... | |
| function [
rowvec< double > t , matrix < double > x , double ctime ] = | computeTrajectory (colvec< double > mu,integer inputidx) |
| Computes a solution/trajectory for the given mu and inputidx in the SCALED state space. More... | |
| function matrix < double > mu = | getRandomParam (integer num,integer seed) |
| Gets a random parameter sample from the system's parameter domain P. More... | |
| Public Member Functions inherited from KerMorObject | |
| KerMorObject () | |
| Constructs a new KerMor object. More... | |
| function | display () |
| disp(object2str(this)); More... | |
| function bool = | eq (B) |
| Checks equality of two KerMor objects. More... | |
| function bool = | ne (B) |
| Checks if two KerMorObjects are different. More... | |
| function cn = | getClassName () |
| Returns the simple class name of this object without packages. More... | |
| Public Member Functions inherited from DPCMObject | |
| DPCMObject () | |
| Creates a new DPCM object. More... | |
| DPCMObject () | |
Static Public Member Functions | |
| static function res = | test_Motoneuron () |
| Static Public Member Functions inherited from models.BaseFullModel | |
| static function | test_BaseModels () |
| static function res = | test_BareModel () |
| static function | test_LinearModel () |
| static function | test_LinearModelNoProj () |
| static function | test_LinearModelNoApprox () |
| static function | test_LinearModelParams () |
| static function | test_LinearModelInputs () |
| static function | test_LinearModelParamsInput () |
| static function | test_NonlinearModel () |
| static function | test_NonlinearModelParams () |
| static function | test_NonlinearModelInputs () |
| static function | test_NonlinearModelParamsInput () |
| static function | test_TimeDependentOutput () |
| static function res = | test_FileSystemTidyness () |
| Plain small model. More... | |
Public Attributes | |
| UseNoise | |
| logical | FibreTypeDepMaxMeanCurrent = true |
| Flag that determines if the mean current parameter is constrained depending on the fibre type parameter. More... | |
| Public Attributes inherited from models.BaseFullModel | |
| data.ModelData | Data |
| The full model's data container. Defaults to an empty container. More... | |
| export.JKerMorExport | JKerMorExport |
| Export instance for possible export of this model to JKerMor. More... | |
| sampling.BaseSampler | Sampler |
| The sampling strategy the Model uses. More... | |
| spacereduction.BaseSpaceReducer | SpaceReducer |
| The reduction algorithm for subspaces. More... | |
| approx.BaseApprox | Approx = "[]" |
| The approximation method for the CoreFunction. More... | |
| function_handle | preApproximationTrainingCallback |
| Advanced property. Must be a function handle taking the current model instance. More... | |
| function_handle | postApproximationTrainingCallback |
| Advanced property. Must be a function handle taking the current model instance. More... | |
| logical | EnableTrajectoryCaching = false |
| Flag that enables caching of computed trajectories in a simulation cache stored in KerMor's TempDirectory folder. More... | |
| error.BaseEstimator | ErrorEstimator = "[]" |
| The associated error estimator for this model. More... | |
| logical | ComputeTrajectoryFxiData = false |
| Flag that determines whether fxi data should be computed along with the trajectories or not. More... | |
| logical | ProjectApproxTrainingData = false |
| Flag to determine if the data collected by the approx.Approx.TrainDataSelector should be projected into the previously computed projection space V (see offline phase 3). If so, the \(f(x_i)\) values are also re-computed for the updated \(x_i\) samples. More... | |
| logical | AutoSave = false |
| Flag to enable automatic saving of the model after each individual offline phase step and at other locations prone to data loss due to lengthy computations. More... | |
| char | SaveTag = "" |
| A custom tag that can be used as a prefix to files for corresponding model identification. More... | |
| integer | TrainingInputs |
| The indices of inputs to use for training data generation. Uses the DefaultInput if not set (and DefaultInput is not empty) More... | |
| rowvec< integer > | TrainingParams |
| The indices of the model parameters to use for training data generation. More... | |
| integer | TrainingInputCount |
| Gets the number of inputs used for training. More... | |
| rowvec< double > | OfflinePhaseTimes = "[]" |
| The computation times for all phases of the last offline generation. More... | |
| TrajectoriesCompleted = "[]" | |
| Contains a flag for each input/parameter combination which has been successfully computed completely during the offline phase. More... | |
| Public Attributes inherited from models.BaseModel | |
| models.BaseFirstOrderSystem | System = "[]" |
| The actual dynamical system used in the model. More... | |
| char | Name = "" |
| The name of the Model. More... | |
| matrix< double > | G = 1 |
| The custom scalar product matrix \(\vG\). More... | |
| double | RealTimePlottingMinPause = .1 |
| Minimum pause between successive steps when RealTimePlotting is enabled. More... | |
| logical | isStatic = false |
| Determines if the model is time dependent or static. More... | |
| integer | DefaultInput = "[]" |
| The default input to use if none is given. More... | |
| Times | |
| Evaluation points \(\{0=t_0,\ldots,t_n=T\}\) of the model. More... | |
| rowvec< double > | scaledTimes |
| The time steps Times in scaled time units \(\tilde{t_i} = \frac{t_i}{\tau}\). More... | |
| double | Tscaled |
| The scaled end time \(\tilde{T} = \frac{T}{\tau}\). More... | |
| double | tau |
| Time scaling factor \(\tau\). More... | |
| double | T |
| The final timestep \(T\) up to which to simulate. More... | |
| double | dt |
| The desired time-stepsize \(\Delta t\) for simulations. More... | |
| solvers.BaseSolver | ODESolver |
| The solver to use for the ODE. Must be an instance of any solvers.BaseSolver subclass. More... | |
| logical | RealTimePlotting |
| Determines if the simulation should plot intermediate steps during computation. More... | |
| colvec< double > | DefaultMu = "[]" |
| The default parameter value if none is given. More... | |
| dtscaled = .1 | |
| The scaled timestep \(\tilde{\Delta t} = \frac{\Delta t}{\tau}\). More... | |
| char | gitRefOnSave = "" |
| Contains the GIT revision of this model when it was last saved. More... | |
| Public Attributes inherited from DPCMObject | |
| WorkspaceVariableName = "" | |
| The workspace variable name of this class. Optional. More... | |
| ID = "[]" | |
| An ID that allows to uniquely identify this DPCMObject (at least within the current MatLab session/context). More... | |
| PropertiesChanged = "[]" | |
| The Dictionary containing all the property settings as key/value pairs. More... | |
| Public Attributes inherited from handle | |
| addlistener | |
| Creates a listener for the specified event and assigns a callback function to execute when the event occurs. More... | |
| notify | |
| Broadcast a notice that a specific event is occurring on a specified handle object or array of handle objects. More... | |
| delete | |
| Handle object destructor method that is called when the object's lifecycle ends. More... | |
| disp | |
| Handle object disp method which is called by the display method. See the MATLAB disp function. More... | |
| display | |
| Handle object display method called when MATLAB software interprets an expression returning a handle object that is not terminated by a semicolon. See the MATLAB display function. More... | |
| findobj | |
| Finds objects matching the specified conditions from the input array of handle objects. More... | |
| findprop | |
| Returns a meta.property objects associated with the specified property name. More... | |
| fields | |
| Returns a cell array of string containing the names of public properties. More... | |
| fieldnames | |
| Returns a cell array of string containing the names of public properties. See the MATLAB fieldnames function. More... | |
| isvalid | |
| Returns a logical array in which elements are true if the corresponding elements in the input array are valid handles. This method is Sealed so you cannot override it in a handle subclass. More... | |
| eq | |
| Relational functions example. See details for more information. More... | |
| transpose | |
| Transposes the elements of the handle object array. More... | |
| permute | |
| Rearranges the dimensions of the handle object array. See the MATLAB permute function. More... | |
| reshape | |
| hanges the dimensions of the handle object array to the specified dimensions. See the MATLAB reshape function. More... | |
| sort | |
| ort the handle objects in any array in ascending or descending order. More... | |
| Public Attributes inherited from IParallelizable | |
| ComputeParallel = false | |
| Flag whether the code should be run in parallel or not. More... | |
Static Public Attributes | |
| static const | FILE_UPPERLIMITPOLY = fullfile("fileparts(mfilename('fullpath')),'upperlimitpoly.mat'") |
Static Protected Member Functions | |
| static function this = | loadobj () |
| Static Protected Member Functions inherited from models.BaseFullModel | |
| static function this = | loadobj (this, sobj) |
| Static Protected Member Functions inherited from models.BaseModel | |
| static function this = | loadobj (this, s) |
| Static Protected Member Functions inherited from DPCMObject | |
| static function obj = | loadobj (obj, from) |
| Re-register any registered change listeners! More... | |
| static function obj = | loadobj (obj, from) |
Additional Inherited Members | |
| Protected Member Functions inherited from models.BaseModel | |
| function this = | saveobj () |
| Store the current GIT branch in the object. More... | |
| function | plotstep (src, ed) |
| Callback for the ODE solvers StepPerformed event that enables during-simulation-plotting. More... | |
| Protected Member Functions inherited from KerMorObject | |
| function | checkType (obj, type) |
| Object typechecker. More... | |
| Protected Member Functions inherited from DPCMObject | |
| function | registerProps (varargin) |
| Call this method at any class that defines DPCM observed properties. More... | |
| function | registerProps (varargin) |
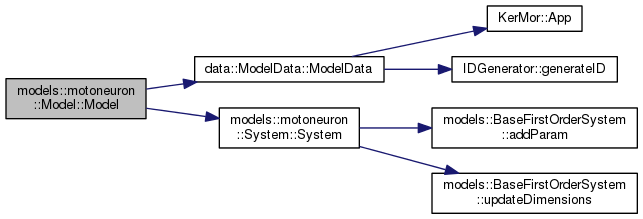
| models.motoneuron.Model.Model | ( | limit_meancurrent | ) |
Definition at line 82 of file Model.m.
References models.BaseFullModel.Data, models.BaseModel.DefaultInput, models.BaseModel.DefaultMu, models.BaseModel.dt, FibreTypeDepMaxMeanCurrent, data.ModelData.ModelData(), models.BaseModel.Name, models.BaseModel.ODESolver, models.BaseFullModel.SaveTag, models.motoneuron.System.System(), models.BaseModel.T, and models.BaseFullModel.TrainingInputs.
|
staticprotected |
| function varargout = models.motoneuron.Model.plot | ( | varargin | ) |
plots some interesting states of the model
Definition at line 107 of file Model.m.
References models.motoneuron.System.plot().

|
static |
| models.motoneuron.Model.FibreTypeDepMaxMeanCurrent = true |
Flag that determines if the mean current parameter is constrained depending on the fibre type parameter.
The actually applicable parameter domain of fibre_type and mean_current is not a square if only "useful" frequencies in the range of 10-60 Hz are required.
An experimentally determined polynomial is used to limit the mean_current.
Default: true
SetAccess = Private, GetAccess = Public Definition at line 57 of file Model.m.
Referenced by Model(), and models.motoneuron.System.prepareSimulation().
|
static |
 1.8.6
1.8.6 
