 |
KerMor
0.9
Model order reduction for nonlinear dynamical systems and nonlinear approximation
|
|
KerMor
0.9
Model order reduction for nonlinear dynamical systems and nonlinear approximation
|
ACompEvalCoreFun: A normal CoreFun which supports single-component evaluation. More...
ACompEvalCoreFun: A normal CoreFun which supports single-component evaluation.
This extra abilities are used within the approx.DEIM approximation.
This class is part of the framework
Homepage http://www.morepas.org/software/index.htmlDocumentation http://www.morepas.org/software/kermor/index.htmlLicense KerMor license conditions Definition at line 18 of file ACompEvalCoreFun.m.
Public Member Functions | |
| ACompEvalCoreFun (sys) | |
| function fx = | evaluateComponentSet (integer nr,colvec< double > x,double t) |
| Computes the full or reduced component functions of the given point set. More... | |
| function fx = | evaluateComponentSetMulti (integer nr,matrix< double > x,rowvec< double > t,matrix< double > mu) |
| Computes the full component functions of the given point set. More... | |
| function dfx = | evaluateComponentSetGradientsAt (integer nr,colvec< double > x,double t) |
| Computes the full/reduced gradients of all component functions of the given point set. More... | |
| function J = | evaluateJacobianSet (integer nr,colvec< double > x,double t) |
| Returns the jacobian entries of the point set that have been specified using setPointSet's argument jpd. More... | |
| function J = | evaluateJacobianSetMulti (integer nr,matrix< double > x,rowvec< double > t,colvec< double > mu) |
| Returns the jacobian entries at multiple locations/times/parameters of the point set that have been specified using setPointSet's argument jpd. More... | |
| function | setPointSet (nr, pts, jpd) |
| Parameters: pts: A row vector with the desired points jpd: ("Jacobian Partial Derivatives") A cell array of size equal to the number of points. Each cell contains the indices for which the partial derivatives of the corresponding component function will be computed when calling evaluateJacobianSet. More... | |
| function target = | project (V, W, target) |
| function copy = | clone (copy) |
| The interface method with returns a copy of the current class instance. More... | |
| function res = | test_ComponentEvalMatch (xsize) |
| Tests if the local implementation of evaluateComponents matches the full evaluation. More... | |
 Public Member Functions inherited from dscomponents.ACoreFun Public Member Functions inherited from dscomponents.ACoreFun | |
| ACoreFun (sys) | |
| function | setSystem (sys) |
| function target = | project (V, W, target) |
| Sets the protected \(\vV,\vW\) matrices that can be utilized on core function evaluations after projection. More... | |
| function fx = | evaluate (x, t) |
| Evaluates the f-approximation. Depending on a possible projection and the CustomProjection-property the function either calls the inner evaluation directly which assumes \(f = f^r(z)\) or projects the reduced state variable z into the original space and evaluates the function there, so via \(f = V'f(Vz)\). More... | |
| function fx = | evaluateMulti (colvec< double > x,double t,colvec< double > mu) |
| Evaluates this function on multiple locations and maybe multiple times and parameters. More... | |
| function | prepareSimulation (colvec< double > mu) |
| A method that allows parameter-dependent computations to be performed before a simulation using this parameter starts. More... | |
| function J = | getStateJacobian (x, t) |
| Default implementation of jacobian matrix evaluation via finite differences. More... | |
| function J = | getStateJacobianImpl (colvec< double > x,double t) |
| Default implementation of state jacobians. uses finite differences. More... | |
| function copy = | clone (copy) |
| The interface method with returns a copy of the current class instance. More... | |
| function [
matrix< double > J , dx ] = | getStateJacobianFD (x, t,rowvec< integer > partidx) |
| Implementation of jacobian matrix evaluation via finite differences. More... | |
| virtual function fx = | evaluateCoreFun (colvec< double > x,double t) |
| Actual method used to evaluate the dynamical sytems' core function. More... | |
| function res = | test_MultiArgEval (mudim) |
| Convenience function that tests if a custom MultiArgumentEvaluation works as if called with single arguments. More... | |
| function logical res = | test_Jacobian (matrix< double > xa,rowvec< double > ta,matrix< double > mua) |
| Tests the custom provided jacobian matrix against the default finite difference computed one. More... | |
| Public Member Functions inherited from KerMorObject | |
| KerMorObject () | |
| Constructs a new KerMor object. More... | |
| function | display () |
| disp(object2str(this)); More... | |
| function bool = | eq (B) |
| Checks equality of two KerMor objects. More... | |
| function bool = | ne (B) |
| Checks if two KerMorObjects are different. More... | |
| function cn = | getClassName () |
| Returns the simple class name of this object without packages. More... | |
| Public Member Functions inherited from DPCMObject | |
| DPCMObject () | |
| Creates a new DPCM object. More... | |
| DPCMObject () | |
| Public Member Functions inherited from general.AProjectable | |
| function handle target = | project (matrix< double > V,matrix< double > W,handle target) |
| Returns a NEW INSTANCE of the projected object that does not rely on data of the old one via references (everything must be copied to ensure separability of reduced(=projected) versions and full versions, unless. More... | |
| function copy = | clone (copy) |
| The interface method with returns a copy of the current class instance. More... | |
Public Attributes | |
| PointSets | |
| Public Attributes inherited from dscomponents.ACoreFun | |
| logical | TimeDependent = true |
| Flag that indicates if the ACoreFun is (truly) time-dependent. More... | |
| CustomProjection = false | |
| Set this property if the projection process is customized by overriding the default project method. More... | |
| sparse< logical > | JSparsityPattern = "[]" |
| Sparsity pattern for the jacobian matrix. More... | |
| integer | xDim = "[]" |
| The current state space dimension of the function's argument \(x\). More... | |
| integer | fDim = "[]" |
| The current output dimension of the function. More... | |
| models.BaseFirstOrderSystem | System |
| The system associated with the current ACoreFun. More... | |
| colvec< double > | mu = "[]" |
| The current model parameter mu for evaluations. Will not be persisted as only valid for runtime during simulations. More... | |
| Vcache | |
| Wcache | |
| Public Attributes inherited from DPCMObject | |
| WorkspaceVariableName = "" | |
| The workspace variable name of this class. Optional. More... | |
| ID = "[]" | |
| An ID that allows to uniquely identify this DPCMObject (at least within the current MatLab session/context). More... | |
| PropertiesChanged = "[]" | |
| The Dictionary containing all the property settings as key/value pairs. More... | |
| Public Attributes inherited from handle | |
| addlistener | |
| Creates a listener for the specified event and assigns a callback function to execute when the event occurs. More... | |
| notify | |
| Broadcast a notice that a specific event is occurring on a specified handle object or array of handle objects. More... | |
| delete | |
| Handle object destructor method that is called when the object's lifecycle ends. More... | |
| disp | |
| Handle object disp method which is called by the display method. See the MATLAB disp function. More... | |
| display | |
| Handle object display method called when MATLAB software interprets an expression returning a handle object that is not terminated by a semicolon. See the MATLAB display function. More... | |
| findobj | |
| Finds objects matching the specified conditions from the input array of handle objects. More... | |
| findprop | |
| Returns a meta.property objects associated with the specified property name. More... | |
| fields | |
| Returns a cell array of string containing the names of public properties. More... | |
| fieldnames | |
| Returns a cell array of string containing the names of public properties. See the MATLAB fieldnames function. More... | |
| isvalid | |
| Returns a logical array in which elements are true if the corresponding elements in the input array are valid handles. This method is Sealed so you cannot override it in a handle subclass. More... | |
| eq | |
| Relational functions example. See details for more information. More... | |
| transpose | |
| Transposes the elements of the handle object array. More... | |
| permute | |
| Rearranges the dimensions of the handle object array. See the MATLAB permute function. More... | |
| reshape | |
| hanges the dimensions of the handle object array to the specified dimensions. See the MATLAB reshape function. More... | |
| sort | |
| ort the handle objects in any array in ascending or descending order. More... | |
| Public Attributes inherited from general.AProjectable | |
| V | |
| The \(V\) matrix of the biorthogonal pair \(V,W\). More... | |
| W | |
| The \(W\) matrix of the biorthogonal pair \(V,W\). More... | |
Protected Member Functions | |
| function matrix < double > dfx = | evaluateComponentGradientsAt (rowvec< integer > pts,rowvec< integer > ends,rowvec< integer > idx,rowvec< integer > self,colvec< double > x,double t) |
| Default implementation of gradient computation via finite differences. More... | |
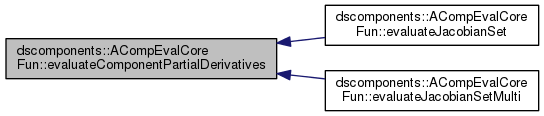
| function dfx = | evaluateComponentPartialDerivatives (rowvec< integer > pts,rowvec< integer > ends,rowvec< integer > idx,rowvec< integer > deriv,rowvec< integer > self,colvec< double > x,double t, dfxsel) |
| Computes specified partial derivatives of \(f\) of the components given by pts and the selected partial derivatives by dfxsel. More... | |
| function dfx = | evaluateComponentPartialDerivativesMulti (pts, ends, idx, deriv, self,colvec< double > x,double t,colvec< double > mu, dfxsel) |
| Multi-argument evaluation method for partial derivatives. Not used so far in KerMor, this is "legacy code" to keep around if needed at any stage as default finite difference-implementation. More... | |
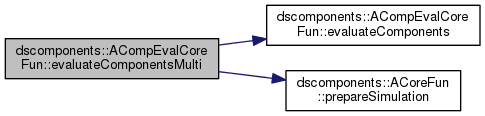
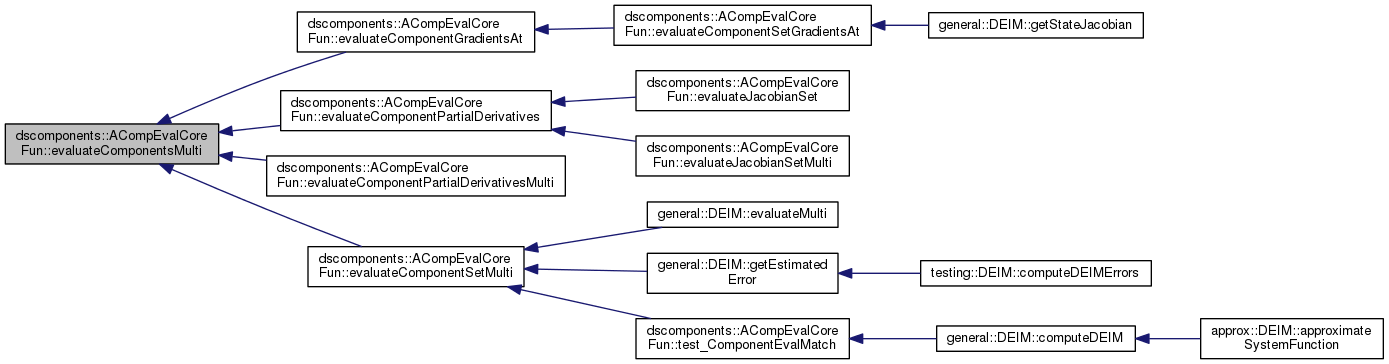
| function fx = | evaluateComponentsMulti (pts, ends, idx, self,colvec< double > x,double t,colvec< double > mu) |
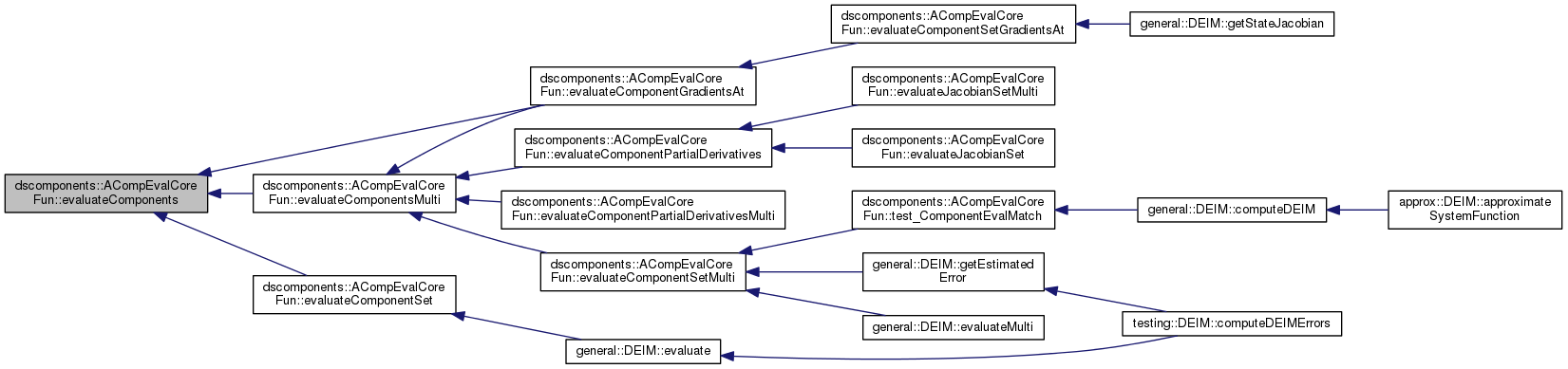
| virtual function fx = | evaluateComponents (rowvec< integer > pts,rowvec< integer > ends,rowvec< integer > idx,rowvec< integer > self,matrix< double > x,rowvec< double > t,colvec< double > mu) |
| This is the template method that actually evaluates the components at given points and values. More... | |
| Protected Member Functions inherited from KerMorObject | |
| function | checkType (obj, type) |
| Object typechecker. More... | |
| Protected Member Functions inherited from DPCMObject | |
| function | registerProps (varargin) |
| Call this method at any class that defines DPCM observed properties. More... | |
| function | registerProps (varargin) |
Static Protected Member Functions | |
| static function obj = | loadobj (obj, from) |
| Static Protected Member Functions inherited from dscomponents.ACoreFun | |
| static function obj = | loadobj (obj, from) |
| Static Protected Member Functions inherited from DPCMObject | |
| static function obj = | loadobj (obj, from) |
| Re-register any registered change listeners! More... | |
| static function obj = | loadobj (obj, from) |
| Static Protected Member Functions inherited from general.AProjectable | |
| static function obj = | loadobj (obj, from) |
Protected Attributes | |
| matrix< double > | S = {""} |
| The x-component selection matrices (precomputed on setting PointSet/AltPointSet). �S� is passed to the function evaluating the components of �� or its derivatives. More... | |
| dscomponents.ACompEvalCoreFun.ACompEvalCoreFun | ( | sys | ) |
Definition at line 108 of file ACompEvalCoreFun.m.
|
virtual |
The interface method with returns a copy of the current class instance.
| target | If clone was called for a subclass of this class, target must contain the new instance of the subclass that is to be the cloned result. |
Implements ICloneable.
Definition at line 415 of file ACompEvalCoreFun.m.
References S.
Referenced by general.DEIM.clone(), and project().

|
protected |
Default implementation of gradient computation via finite differences.
Override in subclasses for more performance if direct derivative information is available.
| pts | The components of \(f\) for which derivatives are required |
| ends | At the \(i\)-th entry it contains the last position in the \(\vx\) vector that indicates an input value relevant for the \(i\)-th point evaluation, i.e. \(f_i(\vx) = f_i(\vx(ends(i-1){:}ends(i)));\) |
| idx | The indices of \(\vx\)-entries in the global \(\vx\) vector w.r.t the \(i\)-th point, e.g. \(xglobal(i-1:i+1) = \vx(ends(i-1):ends(i))\) |
| self | The positions in the \(\vx\) vector that correspond to the \(i\)-th output dimension, if applicable (usually \(f_i\) depends on \(x_i\), but not necessarily) |
| x | The state space location \(\vx\) |
| t | The corresponding times \(t\) for the state \(\vx\) |
| dfx | A length(pts) x size(x,1) matrix containing the non-zero elements of the gradients of each component function specified by pts. |
Definition at line 500 of file ACompEvalCoreFun.m.
References evaluateComponents(), evaluateComponentsMulti(), I, dscomponents.ACoreFun.mu, and X.
Referenced by evaluateComponentSetGradientsAt().


|
protected |
Computes specified partial derivatives of \(f\) of the components given by pts and the selected partial derivatives by dfxsel.
Override in subclasses for optimized performance
| pts | The components of \(f\) for which derivatives are required |
| ends | At the \(i\)-th entry it contains the last position in the \(\vx\) vector that indicates an input value relevant for the \(i\)-th point evaluation, i.e. \(f_i(\vx) = f_i(\vx(ends(i-1){:}ends(i)));\) |
| idx | The indices of \(\vx\)-entries in the global \(\vx\) vector w.r.t the \(i\)-th point, e.g. \(xglobal(i-1:i+1) = \vx(ends(i-1):ends(i))\) |
| deriv | The indices within \(\vx\) that derivatives are required for. |
| self | The positions in the \(\vx\) vector that correspond to the \(i\)-th output dimension, if applicable (usually \(f_i\) depends on \(x_i\), but not necessarily) |
| x | The state space location \(\vx\) |
| t | The corresponding times \(t\) for the state \(\vx\) |
| dfxsel | A derivative selection matrix. Contains the mapping for each row of x to the output points pts. As deriv might contain less than size(x,1) values, use |
| dfxsel(,deriv)' | to select the mapping for the actually computed derivatives. |
| dfx | A column vector with numel(deriv) rows containing the derivatives at all specified pts i with respect to the coordinates given by idx(ends(i-1):ends(i)) |
Definition at line 537 of file ACompEvalCoreFun.m.
References evaluateComponentsMulti(), I, dscomponents.ACoreFun.mu, and X.
Referenced by evaluateJacobianSet(), and evaluateJacobianSetMulti().

|
protected |
Multi-argument evaluation method for partial derivatives. Not used so far in KerMor, this is "legacy code" to keep around if needed at any stage as default finite difference-implementation.
| x | The state variable vector \(\vx(t)\) |
| t | The current time(s) \(t \in [0, T]\) |
| mu | The currently used parameter \(\vmu\). Set to \([]\) if not used. |
Definition at line 581 of file ACompEvalCoreFun.m.
References evaluateComponentsMulti(), I, dscomponents.ACoreFun.mu, handle.reshape, t, and X.

|
protectedpure virtual |
This is the template method that actually evaluates the components at given points and values.
| pts | The components of \(\vf\) for which derivatives are required |
| ends | At the \(i\)-th entry it contains the last position in the \(\vx\) vector that indicates an input value relevant for the \(i\)-th point evaluation, i.e. \(f_i(\vx) = f_i(\vx(ends(i-1){:}ends(i)));\) |
| idx | The indices of \(\vx\)-entries in the global \(\vx\) vector w.r.t the \(i\)-th point, e.g. \(xglobal(i-1:i+1) = \vx(ends(i-1):ends(i))\) |
| self | The positions in the \(\vx\) vector that correspond to the \(i\)-th output dimension, if applicable (usually \(f_i\) depends on \(x_i\), but not necessarily) |
| x | A matrix \(\vX\) with the state space locations \(\vx_i\) in its columns |
| t | The corresponding times \(t_i\) for each state \(\vx_i\) |
| mu | The currently used parameter \(\vmu\). Set to \([]\) if not used. |
| fx | A matrix with pts-many component function evaluations \(f_i(\vx)\) as rows and as many columns as \(\vX\) had. |
Referenced by evaluateComponentGradientsAt(), evaluateComponentSet(), and evaluateComponentsMulti().
| function fx = dscomponents.ACompEvalCoreFun.evaluateComponentSet | ( | integer | nr, |
| colvec< double > | x, | ||
| double | t | ||
| ) |
Computes the full or reduced component functions of the given point set.
| nr | The number of the PointSet to use. |
| x | The state space location \(\vx\) |
| t | The corresponding times \(t\) for the state \(\vx\) |
Definition at line 113 of file ACompEvalCoreFun.m.
References evaluateComponents(), PointSets, and S.
Referenced by general.DEIM.evaluate().


| function dfx = dscomponents.ACompEvalCoreFun.evaluateComponentSetGradientsAt | ( | integer | nr, |
| colvec< double > | x, | ||
| double | t | ||
| ) |
Computes the full/reduced gradients of all component functions of the given point set.
Uses the template method, whose default implementation is via finite differences.
| nr | The number of the PointSet to use. |
| x | The state space location \(\vx\) |
| t | The corresponding times \(t\) for the state \(\vx\) |
Definition at line 150 of file ACompEvalCoreFun.m.
References evaluateComponentGradientsAt(), PointSets, and S.
Referenced by general.DEIM.getStateJacobian().


| function fx = dscomponents.ACompEvalCoreFun.evaluateComponentSetMulti | ( | integer | nr, |
| matrix< double > | x, | ||
| rowvec< double > | t, | ||
| matrix< double > | mu | ||
| ) |
Computes the full component functions of the given point set.
| nr | The number of the PointSet to use. |
| x | The state space locations \(\vx\) |
| t | The corresponding times \(t\) for the state \(\vx\) |
| mu | The corresponding parameters \(\mu\). Can be a single parameter or as many as the size of x |
Definition at line 130 of file ACompEvalCoreFun.m.
References evaluateComponentsMulti(), PointSets, and S.
Referenced by general.DEIM.evaluateMulti(), general.DEIM.getEstimatedError(), and test_ComponentEvalMatch().


|
protected |
| x | The state variable vector \(\vx(t)\) |
| t | The current time(s) \(t \in [0, T]\) |
| mu | The currently used parameter \(\vmu\). Set to \([]\) if not used. |
Definition at line 607 of file ACompEvalCoreFun.m.
References evaluateComponents(), k, dscomponents.ACoreFun.mu, dscomponents.ACoreFun.prepareSimulation(), and t.
Referenced by evaluateComponentGradientsAt(), evaluateComponentPartialDerivatives(), evaluateComponentPartialDerivativesMulti(), and evaluateComponentSetMulti().
| function J = dscomponents.ACompEvalCoreFun.evaluateJacobianSet | ( | integer | nr, |
| colvec< double > | x, | ||
| double | t | ||
| ) |
Returns the jacobian entries of the point set that have been specified using setPointSet's argument jpd.
| nr | The number of the PointSet to use. |
| x | A state space column vector \(\vX\) |
| t | The corresponding time \(t\) |
| J | The values of the given points (linear indexing) in the Jacobian in each row. |
Definition at line 180 of file ACompEvalCoreFun.m.
References evaluateComponentPartialDerivatives(), PointSets, and S.

| function J = dscomponents.ACompEvalCoreFun.evaluateJacobianSetMulti | ( | integer | nr, |
| matrix< double > | x, | ||
| rowvec< double > | t, | ||
| colvec< double > | mu | ||
| ) |
Returns the jacobian entries at multiple locations/times/parameters of the point set that have been specified using setPointSet's argument jpd.
Multi-argument version of evaluateJacobianSet.
| nr | The number of the PointSet to use. |
| x | A matrix \(\vX\) with the state space locations \(\vx_i\) in its columns |
| t | The corresponding times \(t_i\) for each state \(\vx_i\) |
| mu | The currently used parameter \(\vmu\). Set to \([]\) if not used. |
| J | The values of the given points (linear indexing) in the Jacobian in each row, with as many columns as \(\vX\) had. |
Definition at line 213 of file ACompEvalCoreFun.m.
References evaluateComponentPartialDerivatives(), dscomponents.ACoreFun.mu, PointSets, dscomponents.ACoreFun.prepareSimulation(), S, and t.

|
staticprotected |
Definition at line 658 of file ACompEvalCoreFun.m.
| function target = dscomponents.ACompEvalCoreFun.project | ( | V, | |
| W, | |||
| target | |||
| ) |
Definition at line 400 of file ACompEvalCoreFun.m.
References clone(), S, and general.AProjectable.V.
Referenced by general.DEIM.project().


| function dscomponents.ACompEvalCoreFun.setPointSet | ( | nr, | |
| pts, | |||
| jpd | |||
| ) |
Parameters: pts: A row vector with the desired points jpd: ("Jacobian Partial Derivatives") A cell array of size equal to the number of points. Each cell contains the indices for which the partial derivatives of the corresponding component function will be computed when calling evaluateJacobianSet.
Definition at line 274 of file ACompEvalCoreFun.m.
References dscomponents.ACoreFun.JSparsityPattern, handle.reshape, S, handle.sort, t, general.AProjectable.V, and dscomponents.ACoreFun.xDim.
Referenced by test_ComponentEvalMatch(), and general.DEIM.updateOrderData().

| function res = dscomponents.ACompEvalCoreFun.test_ComponentEvalMatch | ( | xsize | ) |
Tests if the local implementation of evaluateComponents matches the full evaluation.
Definition at line 437 of file ACompEvalCoreFun.m.
References evaluateComponentSetMulti(), dscomponents.ACoreFun.evaluateMulti(), dscomponents.ACoreFun.mu, PointSets, setPointSet(), t, general.AProjectable.V, and dscomponents.ACoreFun.xDim.
Referenced by general.DEIM.computeDEIM().


| dscomponents.ACompEvalCoreFun.PointSets |
Definition at line 58 of file ACompEvalCoreFun.m.
Referenced by evaluateComponentSet(), models.muscle.Dynamics.evaluateComponentSet(), evaluateComponentSetGradientsAt(), evaluateComponentSetMulti(), models.muscle.Dynamics.evaluateComponentSetMulti(), evaluateJacobianSet(), evaluateJacobianSetMulti(), and test_ComponentEvalMatch().
|
protected |
The x-component selection matrices (precomputed on setting PointSet/AltPointSet). �S� is passed to the function evaluating the components of �� or its derivatives.
cellarray of
SetAccess = Private, GetAccess = Protected Definition at line 87 of file ACompEvalCoreFun.m.
Referenced by clone(), evaluateComponentSet(), evaluateComponentSetGradientsAt(), evaluateComponentSetMulti(), evaluateJacobianSet(), evaluateJacobianSetMulti(), project(), and setPointSet().
 1.8.6
1.8.6 
